
Dr. Matheus Fernandes
Fixed Income Quant at
Fidelity Investments
Soft Robot Gripper with Camera-less Object Classification using Machine Learning
Abstract
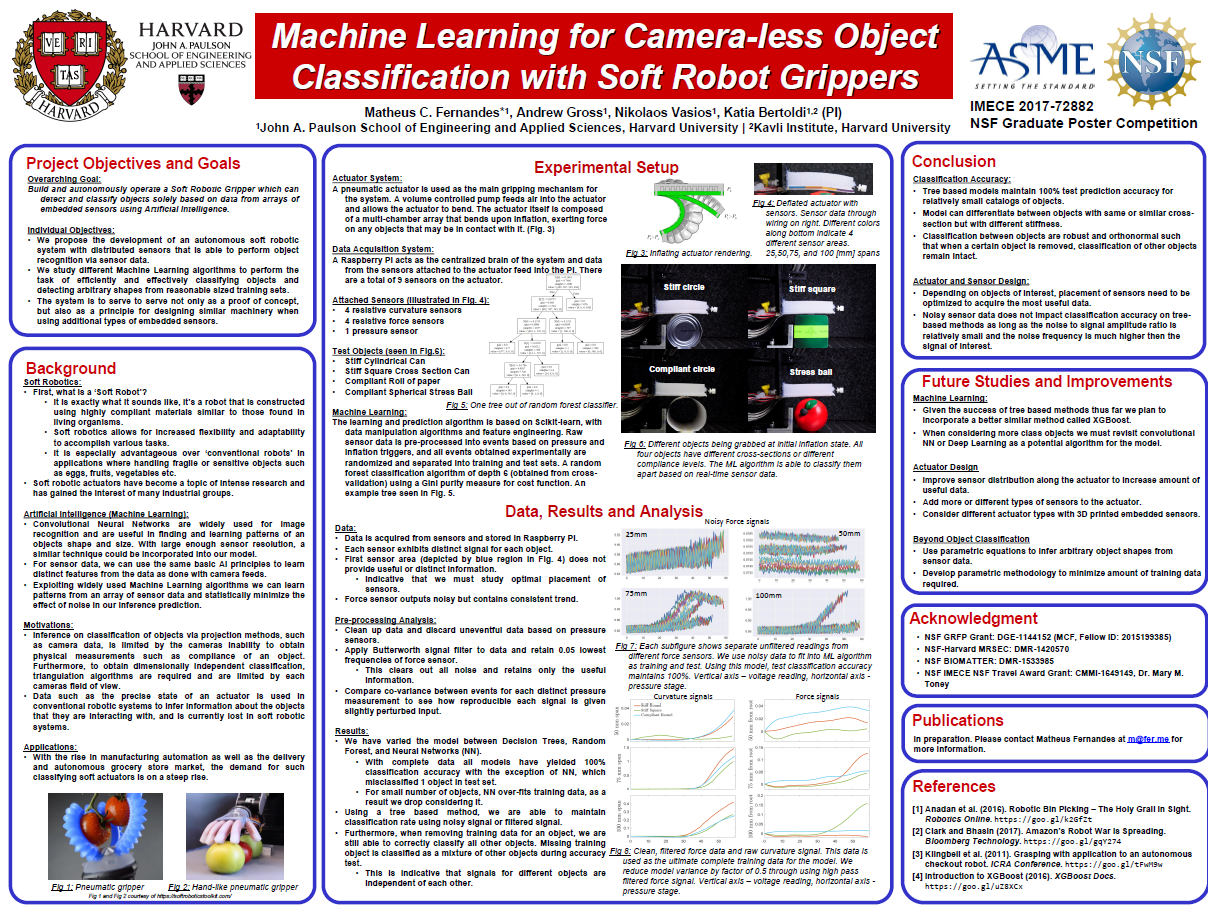
Current automation and soft robotic arms use a collection of cameras and sensors to grab and identify inventory objects in manufacturing as well as distribution centers. However, due to sensing limitations, these systems may not be able to classify objects based on features such as compliance, texture and shape. In this project we explore a new and exciting avenue to classify gripped objects via compliance, curvature and pressure data from embedded sensors in combination with machine learning algorithms. We introduce a soft pneumatic actuator that is able to conform to a desired objects shape and size while continuously providing sensor data from multiple force sensors, curvature sensors and fluid pressure sensors. By acquiring data for multiple pre-classified objects, we develop a training database that is used in generative classification machine learning model. Using the model, we are than able to predict the classification new objects. Furthermore, we validate our model by testing a set of objects for which the classes are known and use similar untrained items to understand the limitations of the model and machinery.